튀빙겐 대학교의 Lecture: Computer Vision 2.1을 공부하며 정리한 자료입니다.
Primitives and Transformations
- Geometric primitives는 3D shapes를 묘사하기 위한 basic building blocks이고, 여기서는 points, lines, planes(점, 선 면) 을 이야기한다.
- Basic transformation에 대해 이야기한다.
2D Points
2D points는 각각 inhomogeneous coordinates, homogeneous 좌표로 아래와 같이 쓸 수 있다.

- 이러한 관계에 있는 모든 벡터들을 동치관계(equivalent)에 있다고 하고 이 벡터들을 homogeneous 벡터라고 한다.
[그림 3]처럼 inhomogeneous 벡터인
homogeneous points의
2D Lines
평면의 한 점은 행벡터
2D lines은 homogeneous coordinates
normalize
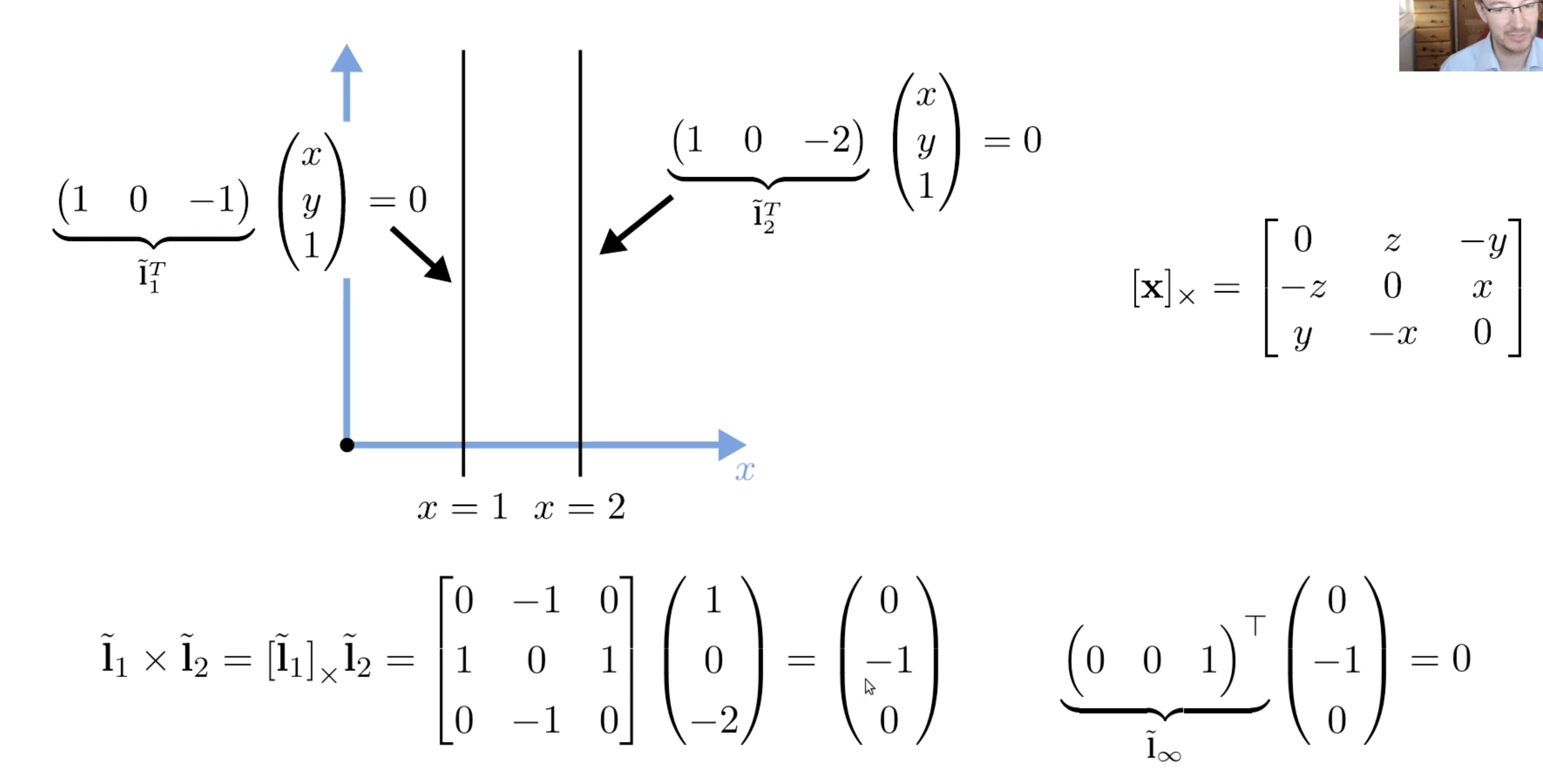
Cross Product
Cross product(벡터곱)은 아래와 같이 표현할 수 있다.
2D Line Arithmetic
Homogeneous coordinates에서 두 lines의 intersection(교점)은
2D Conics
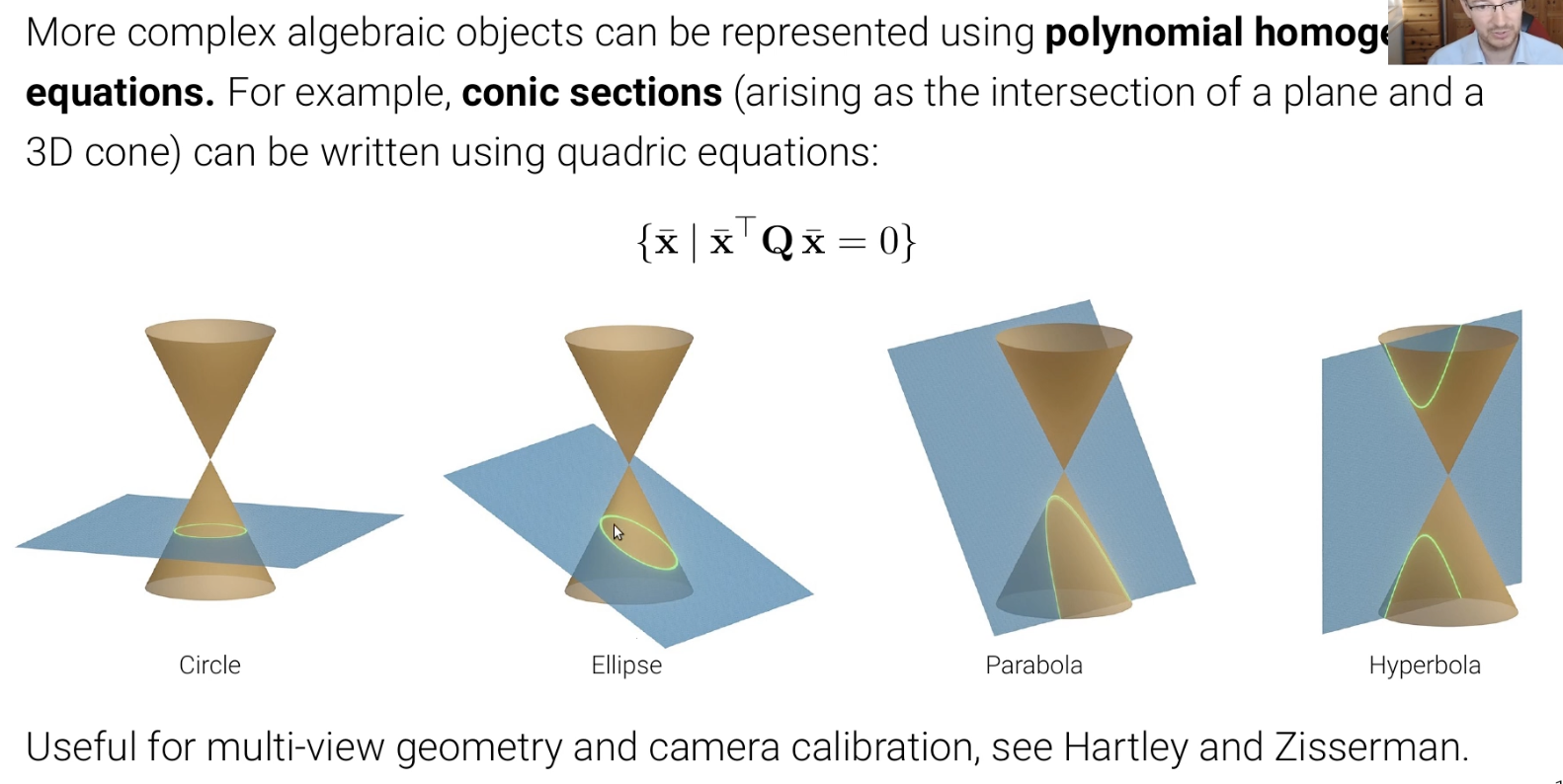
이 강의에서는 자세히 다루지 않는다.
3D Points
3D points는 inhomogeneous coordinates로 [그림 11] 처럼 쓸 수 있다.
homogeneous coordinates로는 [그림 12]처럼 쓸 수 있다. 2D랑 비슷함.
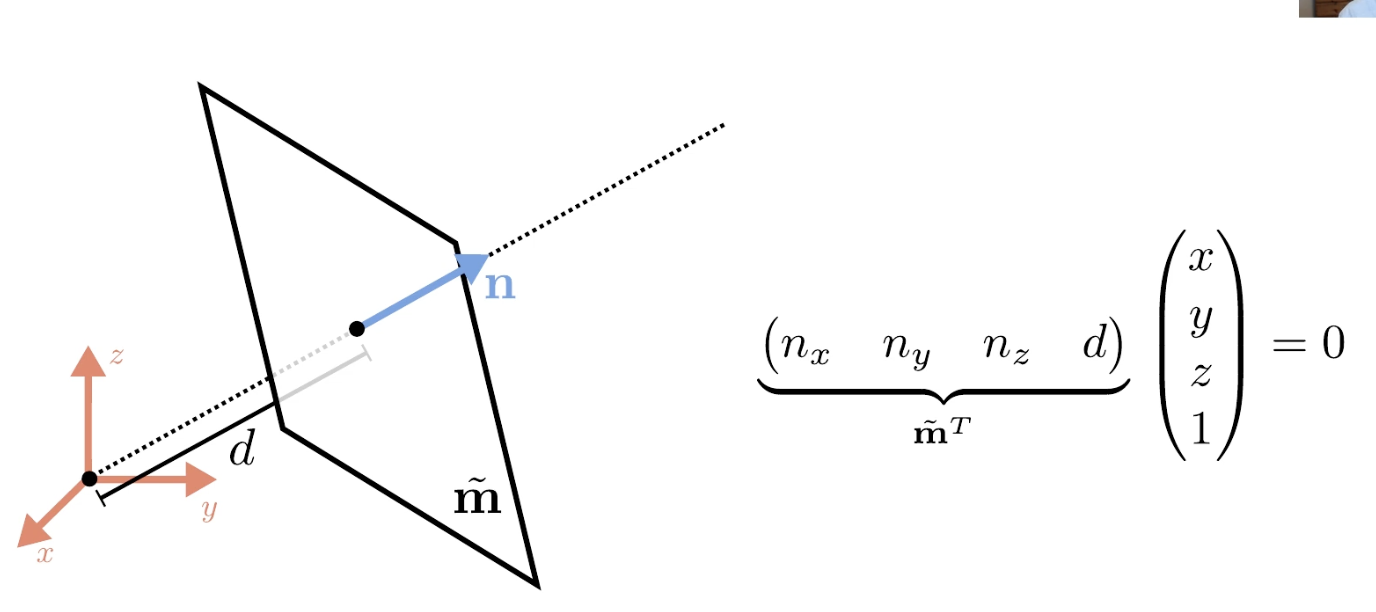
3D Planes
3D planes는 homogeneous coordinates

normalize
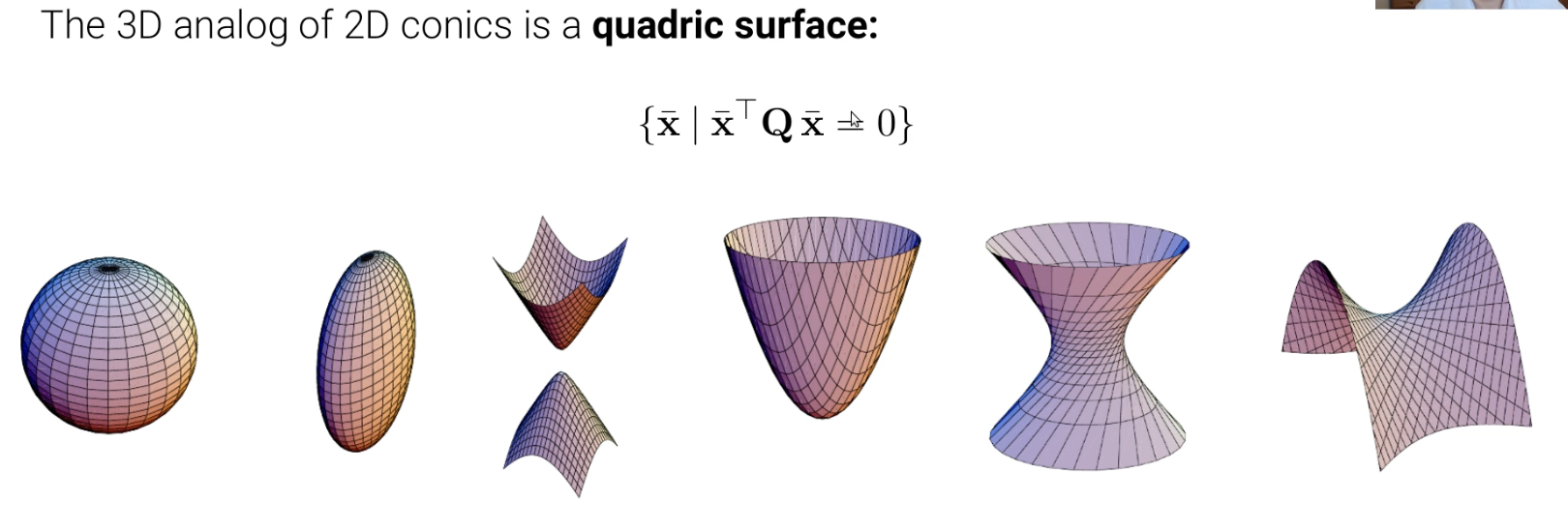
3D Quadrics
Q에 따라 모양이 바뀐다.
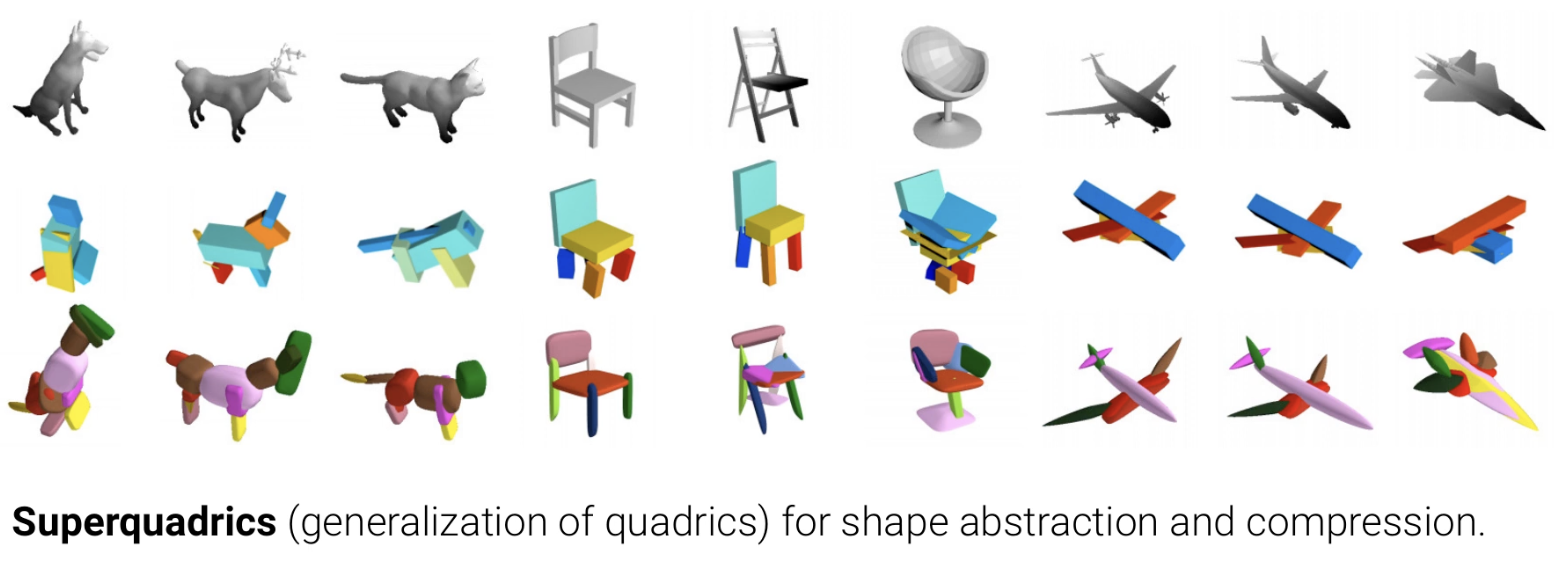
[그림 16]은 해당 강의의 교수님이 연구한 논문인데 Superquadics라고 한다. 대충 듣고 이해한바로는 quadric의 일반화 버전이고 objects의 shape을 콤팩트하게 표현할 수 있는 거라고 한다.
2D Transformations
Translation
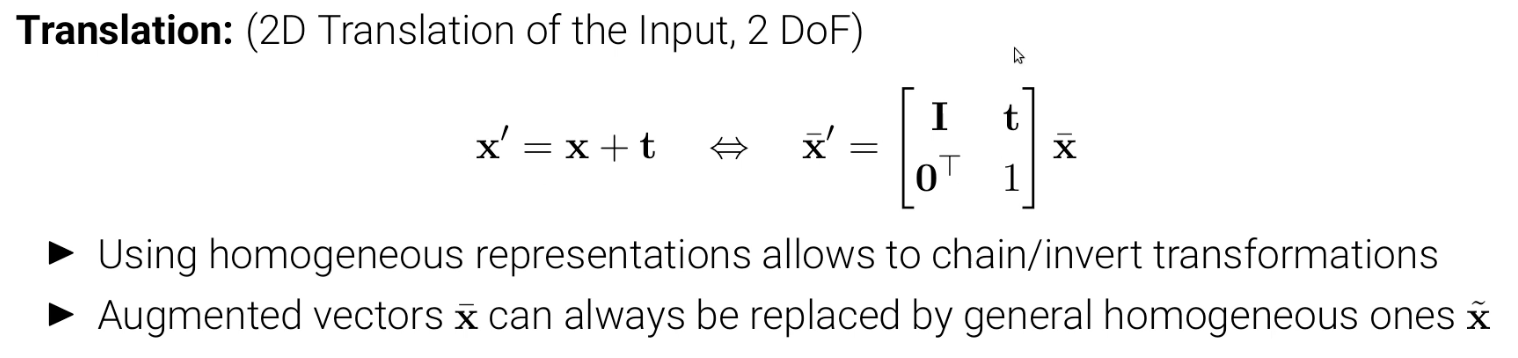
- Homogeneous representations은 transformation의 chain/invert를 가능하게 한다.
Euclidean
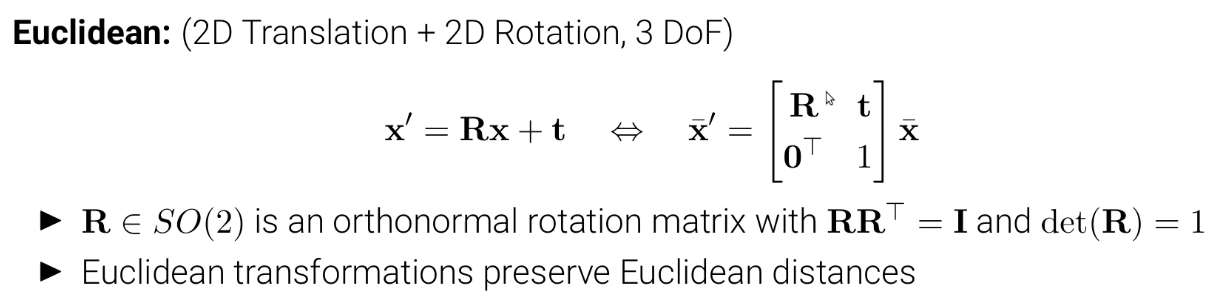
- 또 다른 말로는 isometry 한국어로는 등거리 사상이라고 한다.
- 물체가 변환 전과 후 크기가 동일할 때를 isometry 변환이라고 한다.
- I는
- 자유도가 3이다. 회전이 1(아마도 세타..?), 이동이 2(
Similarity
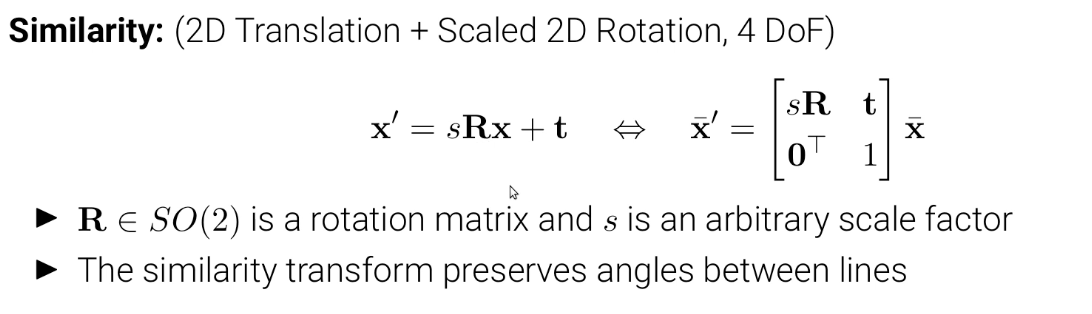
- Euclidean 변환과 배율(scaling) 조정의 합성 변환이다.
- Euclidean transformation에 배율 조정인 s를 추가한 자유도 4를 가진다.
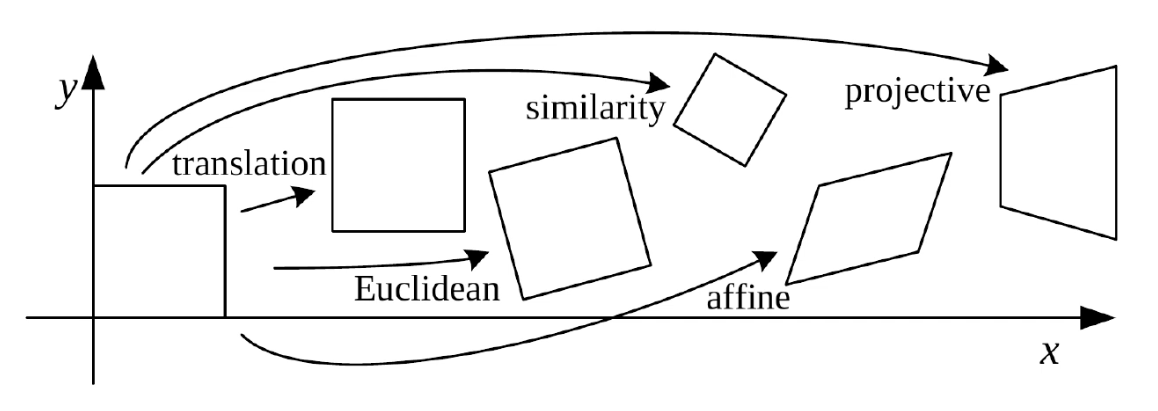
Affine
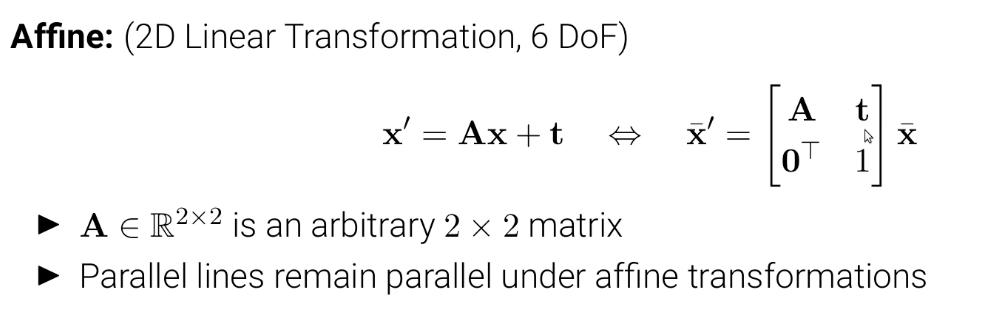
- 6 자유도를 가진다.
- 평행한 직선을 보전하는 성질을 가진다.
Perpective
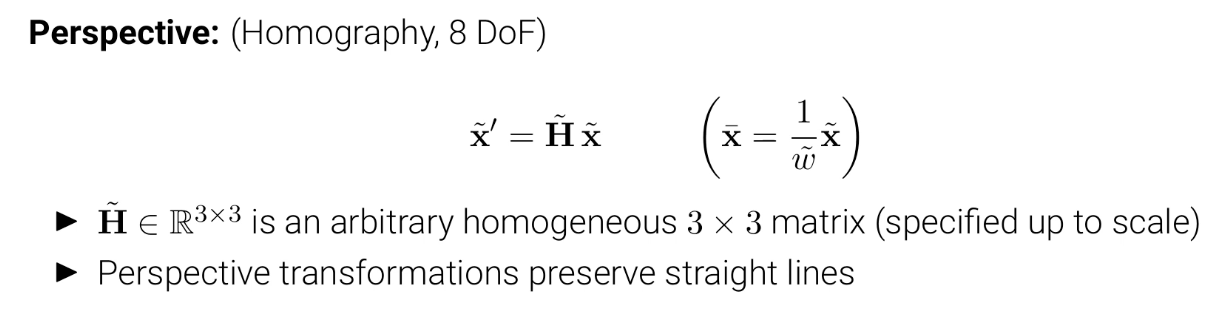
- 8 자유도를 가진다.
- Projective transformation은 다른 transformation들로 분해가 가능하다.
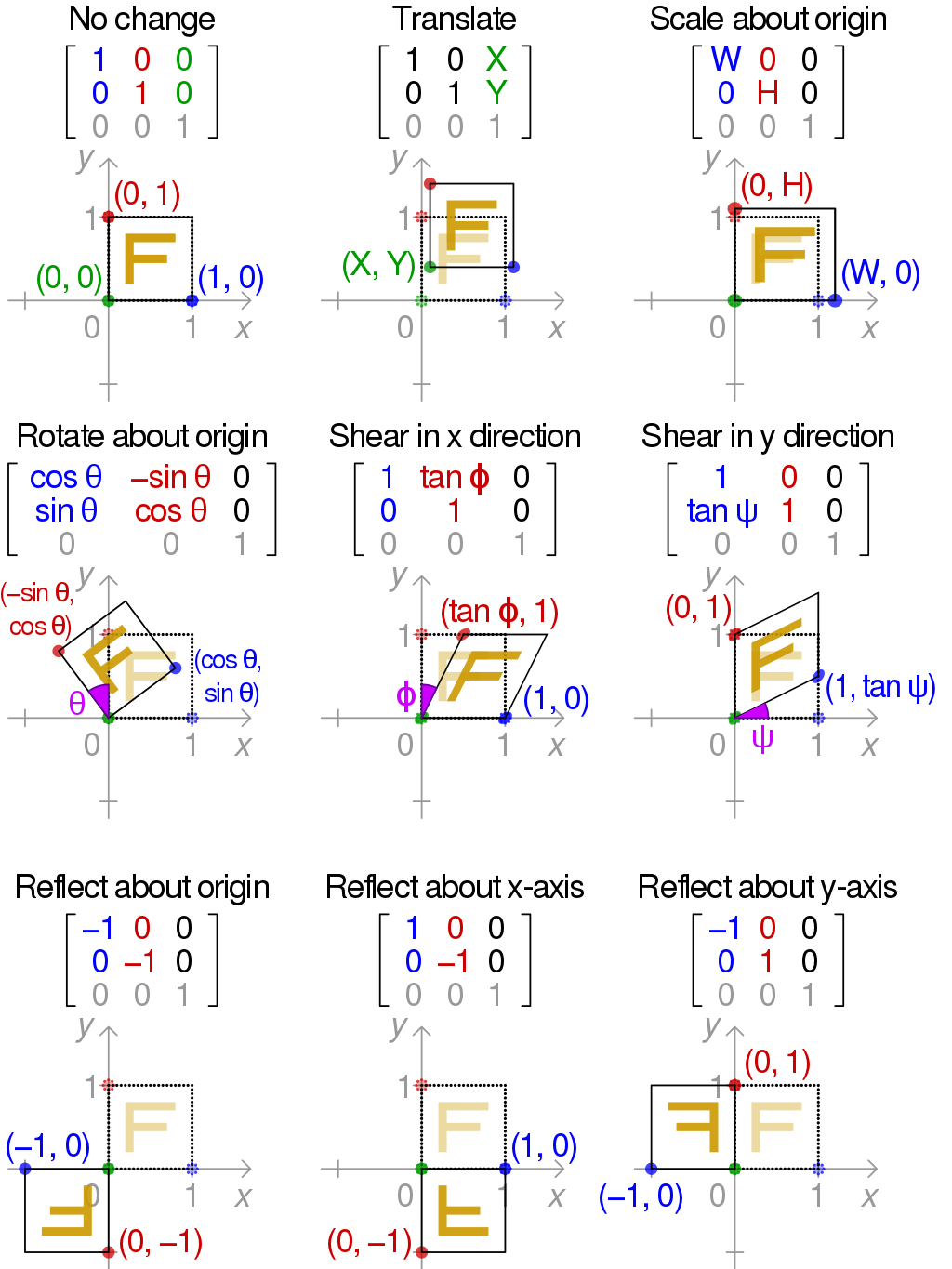
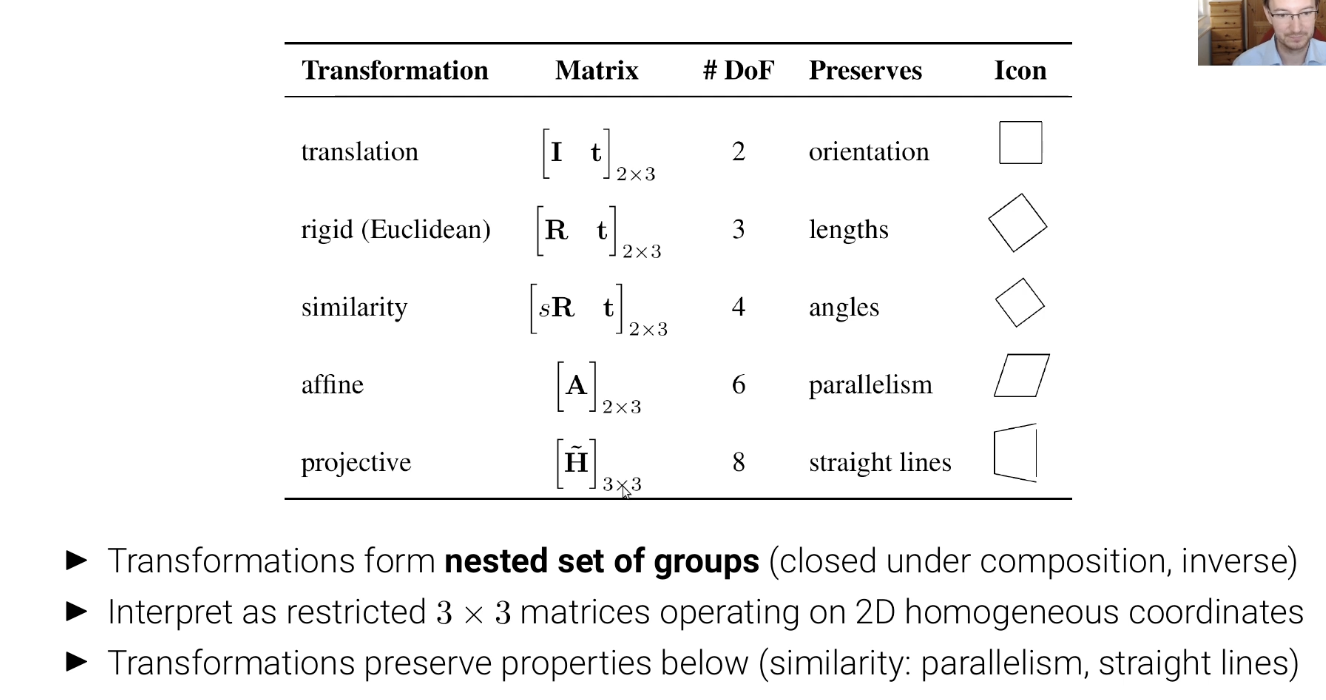
Overview of 2D Transformations
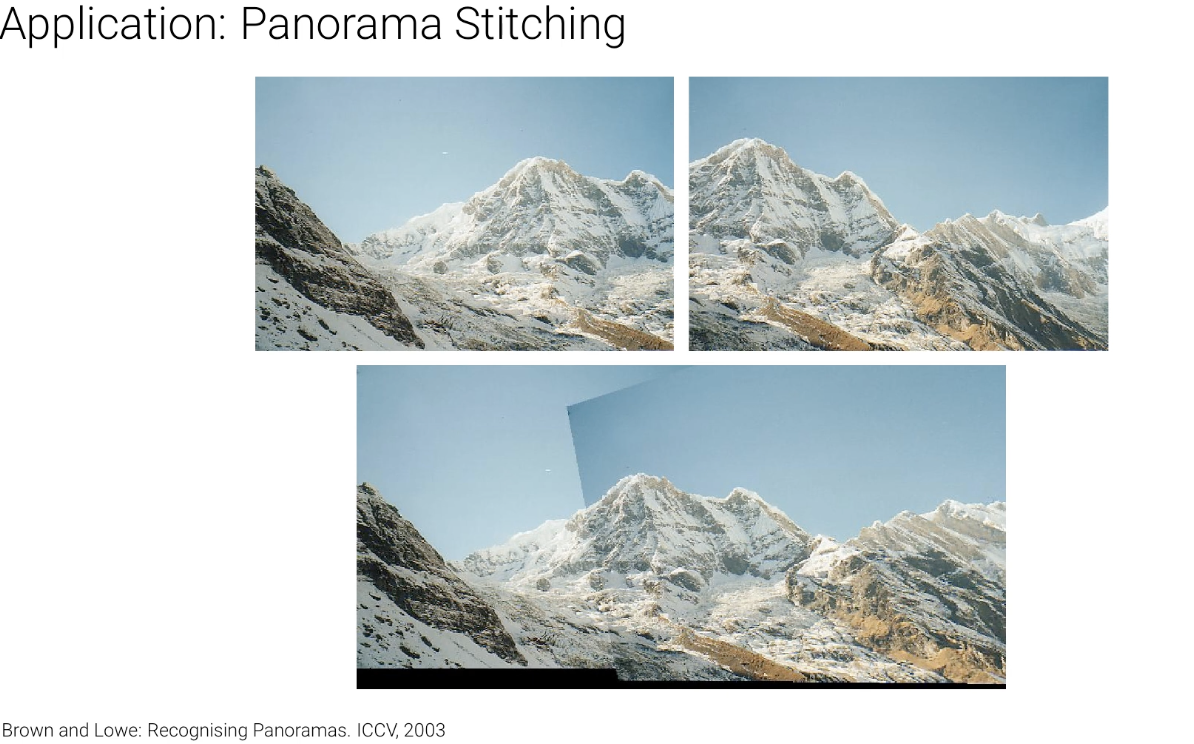
Application: Panorama Stitching
Transformation으로 파노라마를 만들 수 있음. 왼쪽 오른쪽 이미지를 맞추기 위해 이동, 회전, 스케일 조정 등을 해야하기 때문에 transformation이 사용됨.
Reference
- 튀빙겐 대학교 computer vision lecture
- Multiple View Geometry in Computer Vision(컴퓨터 비전을 위한 다중 시점 기하학)
- Multiple View Geometry 책 내용 정리 파트1
'DL|ML' 카테고리의 다른 글
| [Tübingen ML] Computer Vision - Lecture 2.3 (Image Formation: Photometric Image Formation) (0) | 2023.03.16 |
|---|---|
| [Tübingen ML] Computer Vision - Lecture 2.2 (Image Formation: Geometric Image Formation) (2) | 2023.03.14 |
| Self Supervised Learning를 여행하는 히치하이커를 위한 안내서 (4) - SimCLR v1, v2 (0) | 2022.07.31 |
| SSD : Single Shot MultiBox Detector (0) | 2022.07.23 |
| SpaceNet Challenge 1 (0) | 2022.07.21 |



